For decades, the field of robotics has been defined by a fundamental irony: while we have managed to create machines that can calculate complex trajectories, recognize faces, and translate languages in milliseconds, they remain remarkably “clumsy.” A robot can identify a delicate wine glass with perfect accuracy, yet struggle to pick it up without crushing it or dropping it.
The missing link has always been tactile feedback—the intuitive, reflexive sense of touch that humans take for granted. Traditional robotic touch has relied on cumbersome arrays of electronic sensors, which are often fragile, computationally expensive, and difficult to integrate into the curved, flexible surfaces of a robotic hand. However, a breakthrough from researchers at Queen Mary University of London is poised to change the landscape of robotics forever. By developing a new “mechanochromic” tactile sensor, scientists have found a way to turn pressure into visible information, essentially allowing robots to "see" what they are touching.
The Core Innovation: Converting Force to Color
As detailed in a recent study published in the journal Science Advances, the research team, led by a multidisciplinary group of engineers and materials scientists, has moved away from the digital-heavy approach to tactile sensing. Instead of wiring a robotic fingertip with hundreds of individual pressure-sensitive electrodes—a method that requires massive data processing—they have developed a synthetic material that acts as a sensory surface.
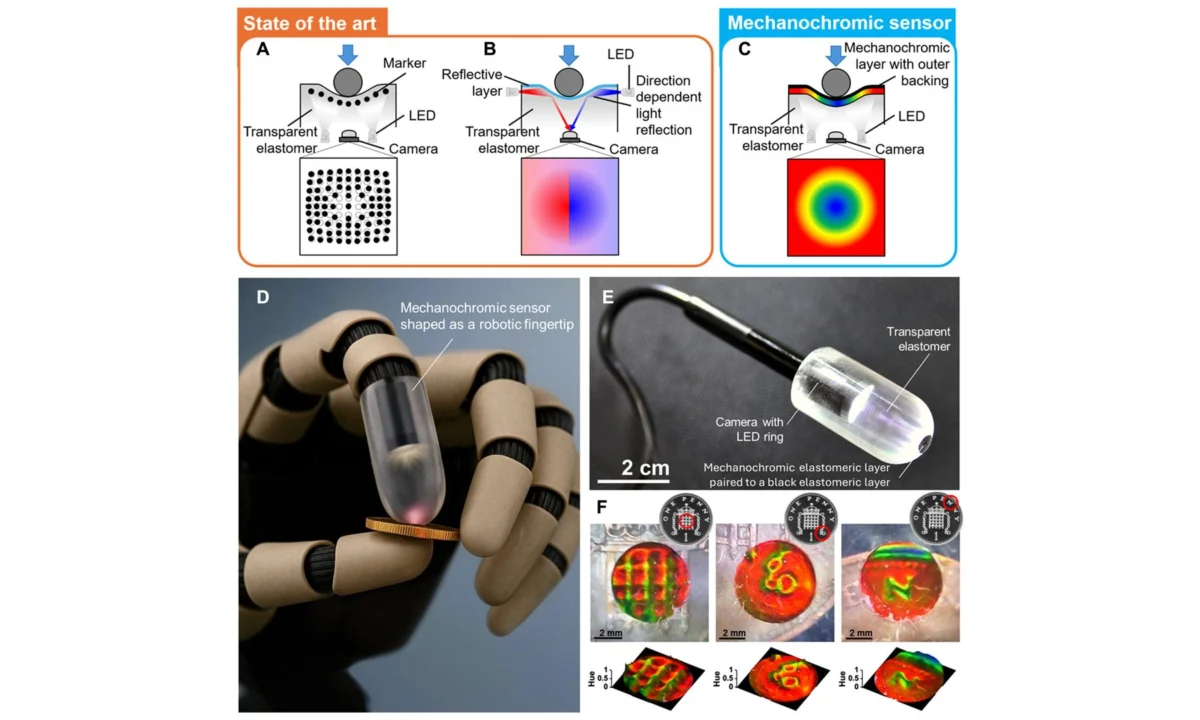
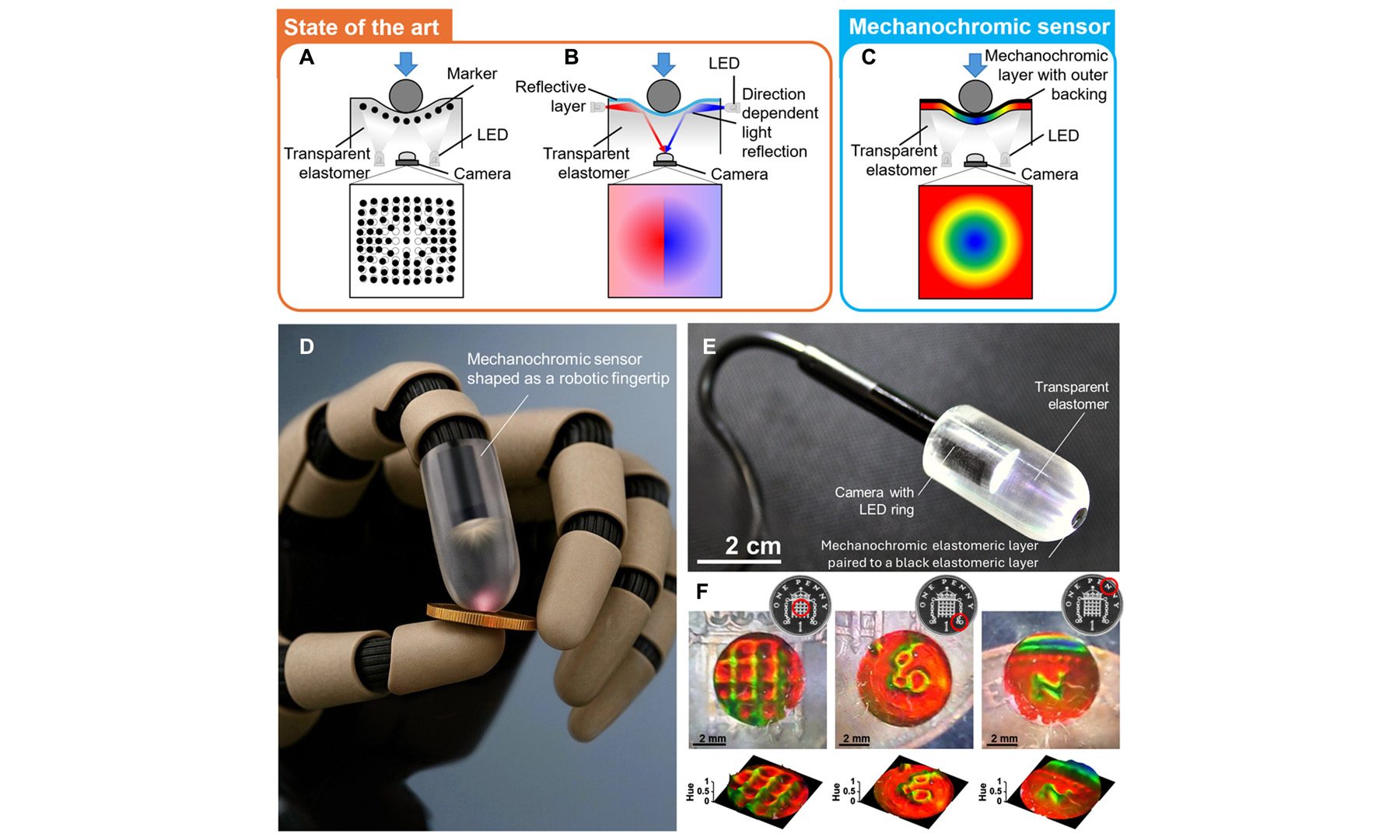
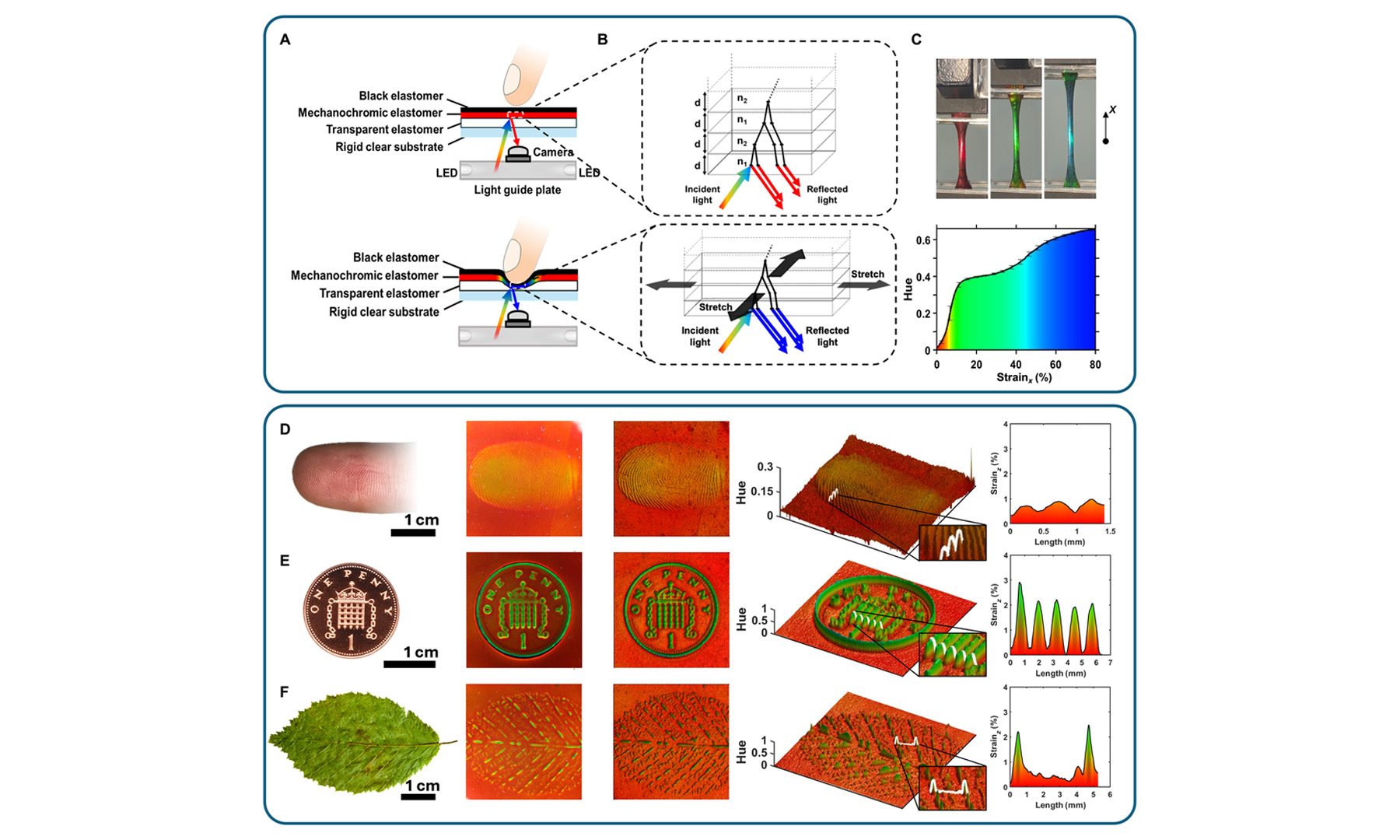
The mechanism is surprisingly elegant. The sensor is built from a soft, compliant material that exhibits mechanochromic properties. When pressure is applied to this surface, the material undergoes a structural deformation that alters its light-reflecting properties, causing it to change color in real time.
Because these color changes are physical, they can be captured by a standard, off-the-shelf USB camera mounted within or behind the sensor. This eliminates the need for complex internal wiring or massive data-processing chips at the point of contact. The camera simply monitors the “color map” on the surface, and the robot’s computer vision software interprets these patterns to determine exactly where, how hard, and in what shape the object is being touched.
A Chronology of Tactile Development
The journey to this discovery is part of a broader, decade-long effort to replicate human dexterity in machines.
- The Early Years (2010–2015): Roboticists experimented with piezoresistive sensors—materials that change their electrical resistance when squeezed. While effective, these sensors were prone to "noise" and required complex calibration, making them difficult to scale for commercial use.
- The Vision-Based Shift (2016–2022): The industry saw a pivot toward "vision-based" tactile sensors, such as the GelSight project. These utilized internal cameras to look at the deformation of a soft gel layer. While accurate, these sensors were often bulky, limited by the size of the camera housing, and required significant computational power to render 3D maps from 2D images.
- The Mechanochromic Breakthrough (2023–2026): The Queen Mary team’s work represents the latest evolution. By integrating the sensing material directly into the outer "skin" of the robot, they have reduced the complexity of the internal hardware. This marks a shift from treating sensors as "add-ons" to treating them as a fundamental property of the robotic limb’s material composition.
Supporting Data and Technical Advantages
The implications of this shift from electronic sensing to optical sensing are profound, particularly when examining the efficiency of the system.
In a traditional sensor array, the resolution is capped by the number of sensors you can physically pack into a square centimeter. If you have 100 sensors in a fingertip, you have 100 data points. The mechanochromic approach, by contrast, provides a continuous analog field. The resolution is limited only by the camera’s pixel density.
Furthermore, the data processing burden is significantly lowered. Instead of calculating electrical resistance across thousands of nodes, the robot uses standard image-processing algorithms to read the color intensity. Preliminary tests conducted by the research team showed that the system could accurately distinguish between various textures and force profiles with sub-millimeter precision. The latency—the time it takes for the robot to register the touch—was measured in milliseconds, making it suitable for the rapid, reactive movements required in high-speed assembly lines.
Official Responses and Expert Perspective
The research has garnered significant attention from the global robotics community. Dr. Gianluca Sasso, a lead researcher on the project, noted in the publication that the primary goal was to "simplify the bridge between the physical world and digital processing."
"We wanted to strip away the layers of abstraction that currently separate a robot from its environment," the team noted in their summary. "By making touch visible, we are essentially leveraging the existing, highly-optimized visual processing hardware that most modern robots already possess. We aren’t adding a new sense; we are translating touch into a language the robot already speaks fluently: vision."
While the technology is currently in the prototype stage, industry experts are already speculating on its commercial viability. Unlike custom-built electronic sensor arrays, which can cost thousands of dollars to manufacture, the materials used in this mechanochromic sensor are relatively inexpensive polymers. This could drastically lower the barrier to entry for small-to-medium-sized robotics manufacturers looking to add tactile capabilities to their products.

Implications: The Future of Interaction
The potential applications for this technology are vast, spanning several critical sectors of the economy:
1. Industrial Manufacturing
In factories, robots are often relegated to repetitive, high-force tasks because they cannot "feel" delicate components. With high-resolution tactile feedback, a robot could handle sensitive electronics, assemble intricate watch movements, or package fragile consumer goods with the same grace as a human worker.
2. Surgical Robotics
Perhaps the most high-stakes application lies in medicine. Surgeons using teleoperated robotic systems currently rely entirely on visual input. The addition of high-resolution touch could allow a surgeon to "feel" the stiffness of a tumor versus healthy tissue, potentially reducing errors during minimally invasive procedures.

3. Prosthetic Technology
For amputees, the lack of sensory feedback in current prosthetics is a major quality-of-life issue. By integrating this color-changing material into a prosthetic finger, the limb could provide visual feedback to a system that translates that data into nerve stimulation, effectively giving the user a sense of touch through their own nervous system.
4. Human-Robot Collaboration
As robots move out of cages and into our homes and offices, they must be capable of safe, physical interaction. A robot that can feel the pressure of a human hand or recognize the softness of a pet it is petting is a robot that is fundamentally safer and more "socially aware" than its predecessors.
Overcoming the "Speed vs. Accuracy" Paradox
For years, engineers have been trapped in a trade-off: to get high-accuracy tactile data, you needed slow, data-heavy systems. If you wanted speed, you had to settle for low-resolution, "binary" touch (e.g., "I am touching something" vs. "I am not").

The mechanochromic sensor effectively dissolves this paradox. Because the "sensing" is a physical light reaction, it happens at the speed of light. Because the camera is a high-resolution device, the accuracy is superior to most legacy sensors. This enables a new generation of robots that are both fast enough to perform industrial tasks and sensitive enough to handle the complexity of the real world.
Conclusion: A More "Sensible" Future
The development of the color-changing tactile sensor is more than just a clever hardware trick; it is a fundamental shift in how we conceive of robotic interaction. By turning the invisible forces of pressure and torque into the vibrant language of color, the researchers at Queen Mary University of London have provided a bridge between the rigid, calculated world of machines and the fluid, tactile reality of human existence.
As we look toward the next five years of robotic development, the focus will likely shift from making robots "smarter" to making them "more sensitive." With this new breakthrough, the dream of a machine that can pick up a grape without crushing it, or hold a hand with gentle precision, is no longer a sci-fi fantasy—it is a technical reality waiting to be deployed. The era of the "blind" robot is coming to an end, and in its place, we are seeing the rise of machines that can finally reach out and touch the world around them.